

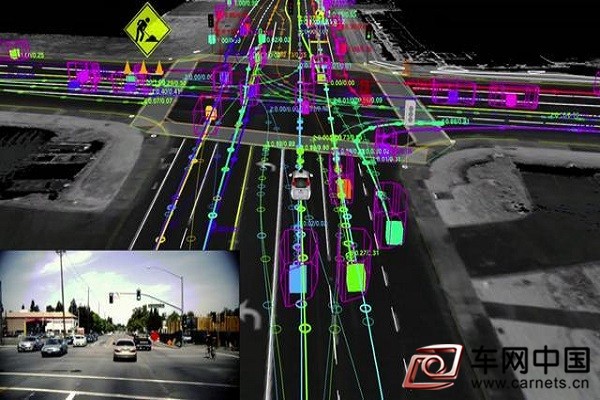
汽车想要拥有自动驾驶的能力,第一步必须具备与人类一样的形状识别能力,从而掌握周围的情况。而自动驾驶汽车上面的摄像头和激光雷达等就相当于汽车的眼睛,对道路和行人等进行探测和识别。
自动驾驶汽车需要具备环境感知,高精度地图和驾驶决策这三个部分。环境感知,包括对车道线、车辆、行人、交通标志等目标的识别与检测,目前来讲最好的办法就是通过深度学习来解决。深度学习利用其深层的神经网络,通过一定的算法能训练出一个识别率非常高的分类器,从而能够使环境感知部分高精度的完成,为驾驶决策模块提供正确的环境信息,保证无人驾驶正常的完成。现在深度学习的方法建立的机器学习项目很多都超过了人眼的识别水平。当然,也可以用于决策。
深度学习
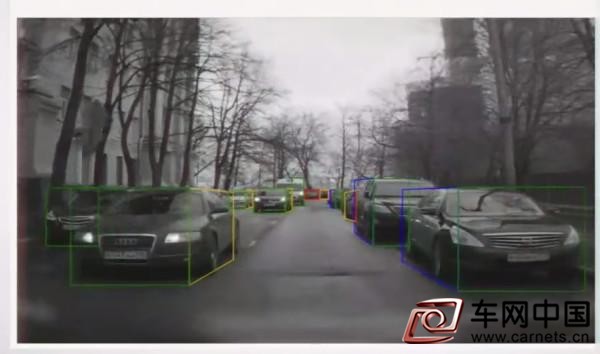
深度学习在自动驾驶中主要用于对摄像头上面的图像处理以及雷达上面的数据处理。由于图像极大丰富的信息以及难以手工建模的特性,深度学习能最大限度的发挥其优势。也就是说深度学习就是将摄像头、以及雷达中探测到的信息进行识别,再通过芯片的运算,得出结论。目前英伟达与高通都拥有自己的车载芯片。目前深度学习算法技术排在前列的公司Mobileye,其在物体识别方面的表现可以实现非常准确的对车的正面以及侧面的检测,并且完全正确的区分左边侧面以及右边侧面。奥迪首次在美国路测无人驾驶汽车时就提出,“自动驾驶的关键是深度学习”。因此,通过深度学习得以让行人避免发生碰撞。








