


日前欧洲inLane项目成功在荷兰埃因霍温(Eindhoven)测试其样机的车道级路线规划导航应用。该测试结果将作为研发最终样品时的考量因素,在2018年6月将与终端用户进行测试。该项目获得了欧洲全球导航卫星系统(EGNSS)的资金支持,该项目计划将伽利略人造卫星群的数据与计算机视觉技术相融合,提供新一代低成本、车道级高精度路线规划导航应用,这就需要基于众包的新一代增强版地图信息的辅助。
大陆集团明年在美国俄亥俄州部署智能交通系统
德国大陆集团计划将于2018年在美国俄亥俄州推出其新型智能交叉路口系统,并在该州的智能城市试点项目中部署。该系统可通过摄像头、雷达和激光雷达等传感器检测交叉路口360°范围内的道路使用者,并将行人和车辆的位置与移动状况传达给所有配备V2X技术的接近车辆。大陆的智能交叉路口概念是一个端到端系统(end-to-end system),包括交叉路口的传感器装置、生成环境模型的强大传感器融合算法以及交叉路口和车辆中的专用短程通信( DSRC)单元。
Quanergy将大规模量产S3固态激光雷达

日前激光雷达供应商Quanergy宣布,公司将在美国加州桑尼维尔的开设的新工厂大规模生产S3固态激光雷达传感器。该工厂拥有最先进的制造技术,并且将在无尘环境、自动化生产该设备。Quanergy光学相控阵(OPA)激光雷达基于超低成本的硅CMOS平台而打造,并将其商业化。S3固态激光雷达传感器紧凑的结构可使其隐藏在车辆或机器的内部,不影响其设计美学或空气动力学。该传感器的大规模生产使得基于HD 3D感知、分类和跟踪的智能自动化成为可能。
无人驾驶雪佛兰Bolt与摩托车发生轻微碰撞
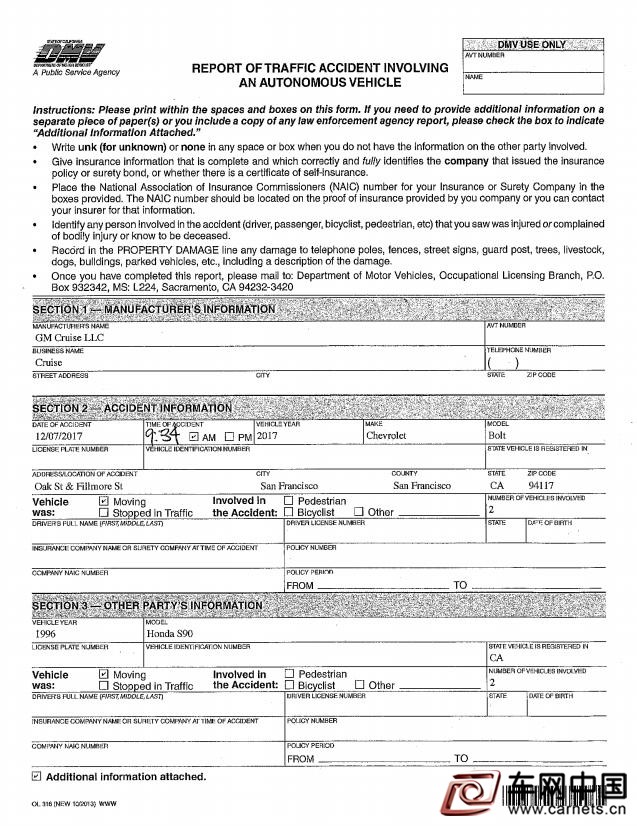
根据加州车辆管理局网站的一份碰撞报告显示,日前一辆雪佛兰Bolt EV自动驾驶汽车与一辆1996年款本田 S90摩托车在旧金山的一处街角发生碰撞。当时雪佛兰Bolt EV使用自动驾驶模式在道路上以时速20公里的速度变道,与时速28公里的摩托车相碰撞。警方并不认为是雪佛兰的责任,而是摩托车非法超车造成的。通用汽车发言人表示,我们在具有挑战性和不可预知的环境中测试我们的自动驾驶汽车,正是因为这样我们才能更快地在道路上获得更好,更安全的自动驾驶技术。在这起事故,这个摩托车车手进入了我们的车道。








