


谈到汽车安全,大家首先想到的品牌大概就是沃尔沃了。在89年前两位瑞典老先生创立沃尔沃的时候,他们就讲:“车是由人来驾驶的。因此,我们做任何事情的指导原则必须始终是安全。”其中大家最耳熟能详的就是三点式安全带就是沃尔沃的发明。
主动安全的核心——紧急刹车系统
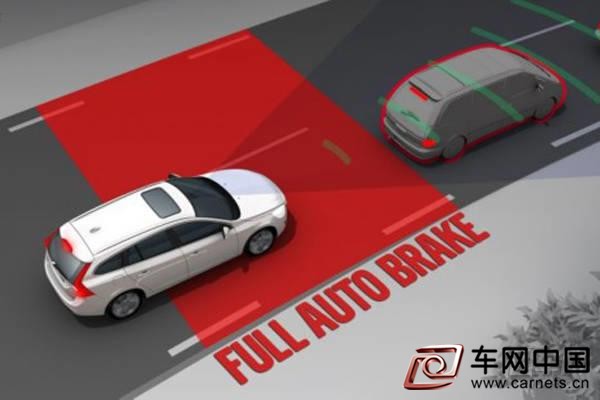
紧急刹车系统英文缩写为AEB(Autonomous Emergency Braking),它主要由3大模块构成,利用雷达、超声波、摄像头等设备侦测前方道路,侦测到有碰撞风险后车载电脑会自动紧急刹车。这项AEB紧急刹车技术将和ESP电子稳定系统一样成为5星级评价里的加分项目。现在沃尔沃、奔驰、大众、福特、斯巴鲁等品牌都已经装备了这种自动紧急刹车系统。
紧急刹车系统为什么这么重要呢?因为大家说的自动驾驶或无人驾驶,如果没有做到真正可靠的避撞或者自动刹车、转向功能的话,一切都是空谈。想象一下,如果前面的障碍物你都不能探测到从而进行警告和自动刹车,这将是非常严重的问题缺陷。
避撞系统的工作原理分为三块,首先是探测,然后是评估决策,最后是干预,包括警告或者自动刹车。
1.探测——识别环境因素

相比以前,探测功能已经取得了巨大的飞跃。从单个雷达到多雷达和摄像头,并结合多传感器融合算法。但是恶劣的天气和道路状况依然是一个挑战。
2.决策——识别精确性

早期的威胁探测算法采用简单的方法来预测单个冲突类型,例如使用至碰撞时间(TTC)探测最危险车辆碰撞。但是你在路上开车,不可能前面只有一个障碍物。所以随着多传感器的应用,现实需要更先进的威胁评估算法,可以同时考虑多个对象。比如现在大家经常看到的一群人一起走,走到路中间,可能有几个人继续往前走,有一些人停在那里,另一些人却往后退,这时候要判断预测是非常复杂的。所以,由于冲突对象潜在路径和速度的不可预测性,需要深层次地了解哪些是驾驶员感受到的具有强相关性的威胁,才能提高决策的相关可信度。
3.干预——人车互动

判断之后还要有一个干预的策略。干预一般是两种,先是警告,再可能干预。怎样警告呢?一般采取的策略是要使驾驶员接受车辆所给的警告,必须存在一种顾客能够感受到的并可以应对的威胁。如果没有可感受到的威胁存在,原则上车辆不应该警告驾驶员,除非是驾驶员近乎无法解决的冲突将要发生,否则车辆不应自主动作。另外怎么协调人机界面,即驾驶员最后时刻的主动干预与车辆自动干预这两者之间可能的差异,这也是目前面临的挑战。
延伸到自动驾驶

为什么要做自动驾驶?是不是因为最近自动驾驶、无人驾驶炒的很热?自动驾驶以后,我们的驾驶乐趣在哪里?因为很多人喜欢操控,喜欢在山路或者赛道上开车。但回到我们日常生活中,如果大家来看看现在大城市拥堵的交通状况。随着城市化进程的加剧,这将是全球性趋势。除了拥堵,还有安全问题,我国每年至少五六万的交通事故死亡数量。统计显示90%到93%的车辆碰撞事故是人为失误引起的,如果能主动介入,可以有效地降低这种人为的失误。另外,从出行的便利上来看,城市里已经没有更多汽车的空间了,我们现在继续买车代步,还是改成租车或者分时租赁的共享经济模式,等等这些都是自动驾驶可以带来的改变。
自动驾驶车辆系统的主要功能和原理,简单地讲:是通过多传感器融合,包括单个或数个摄像头、毫米波雷达、激光雷达、超声波传感器等,加上云端和高精度地图,来感知周围环境,评估路况和交通状况,相应决策与控制,最后通过制动、转向和发动机系统来执行干预,就像是AEB的延伸。出于安全和可靠的考虑,也应该有备份系统,冗余的执行机构,万一其中一套系统有问题,另外一套系统可以作为一个备份来保证正常行驶。目前乐视和阿里都在强化这方面的技术储备。
总的来说,自动驾驶之路没有捷径,就像练马拉松一样,所采取的策略和方法都是逐步、循序渐进的,通过提炼典型路况,悉心定义测试所用的通勤道路,同时尽量控制风险。在技术成熟之前,必须反复的测试,以保证安全与可靠。






